Selected Publications

Labor, Capital, and Machine: Toward A Labor Process Theory for HCI
Yigang Qin, EunJeong Cheon. (2026).
Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI). 20 pages.
What is labor under capitalism? What it means for workplace technology design?
Keywords: Labor Process, Political Economy, Technology Development
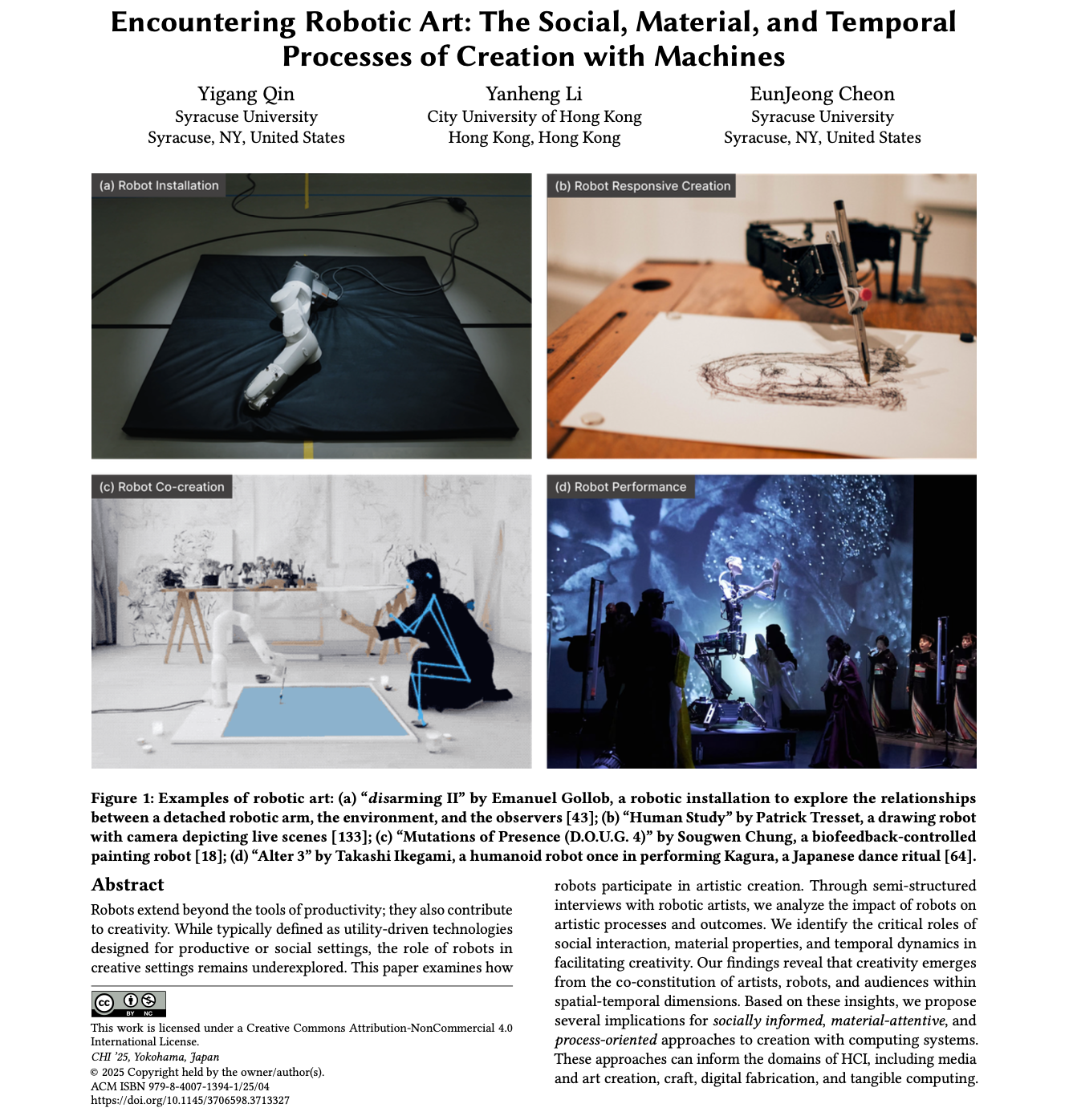
Encountering Robotic Art: The Social, Material, and Temporal Processes of Creation with Machines
Yigang Qin, Yanheng Li, EunJeong Cheon. (2025).
Proceedings of the CHI Conference on Human Factors in Computing Systems (CHI). 18 pages.
Honorable Mention Award
How artists develop creative projects with robotic systems?
Keywords: Work Practice, Creative Work, Robotics

Dismantling Gender Blindness in Online Discussion of a Crime/Gender Dichotomy
Yigang Qin, Weilun Duan, Qunfang Wu, Zhicong Lu. (2024).
Proceedings of the ACM on Human-Computer Interaction, 8(CSCW1). 31 pages.
DEI Recognition Award
How people deny and defend gendered interpretation of public violence?
Keywords: Gender Inequality, Public Violence
View Full List of Publications on Google Scholar